Semi-Quadcopter
Built and wired self-balancing semi-quadcopter with 2 degrees of freedom.

Description
- Built and wired self-balancing semi-quadcopter with 2 degrees of freedom
- Coded Parallax Propeller microcontroller control algorithm in C to stabilize roll and pitch, using inertial measurement unit (IMU) and ultrasonic sensor
- Researched and implemented PID control/tuning, I2C communication, and Kalman filter
- Link to testing video: https://youtu.be/gu-WoXYLHz4
Technologies
- SolidWorks CAD Software
- 3D Printing
- Arduino microcontroller
- C++ programming
- Circuitry design and wiring
- Ultrasonic Sensor
- Inertial Measurement Unit (IMU)
Example Images and Descriptions
Testing Video
Finished semi-quadcopter being tested to ensure it maintains balance and stabilizes itself despite being hit or carrying weights on either motor.

Experiment Setup
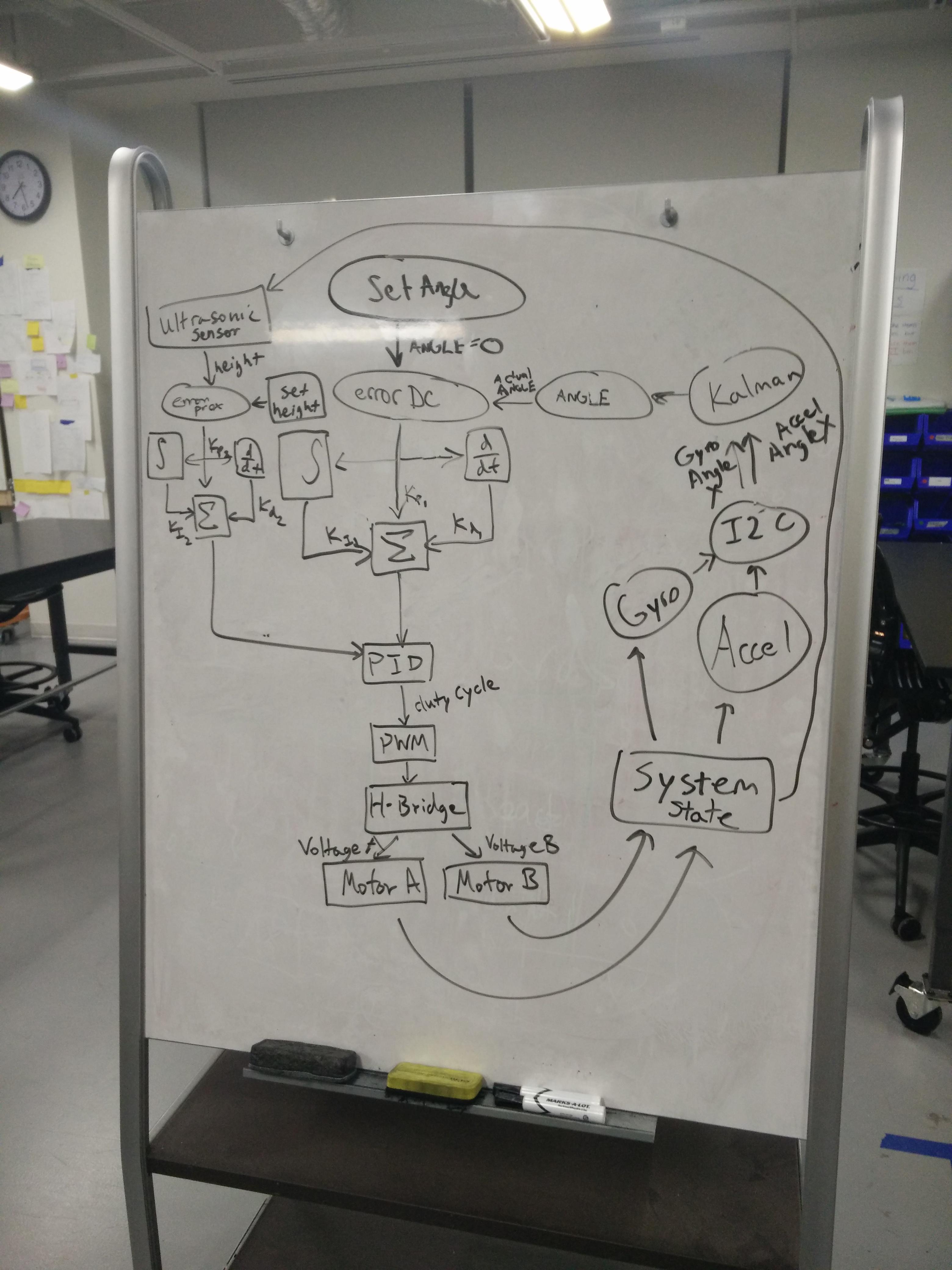
Functional Diagram
Diagram representing major components and systems in the semi-quadcopter and showing how they all interact
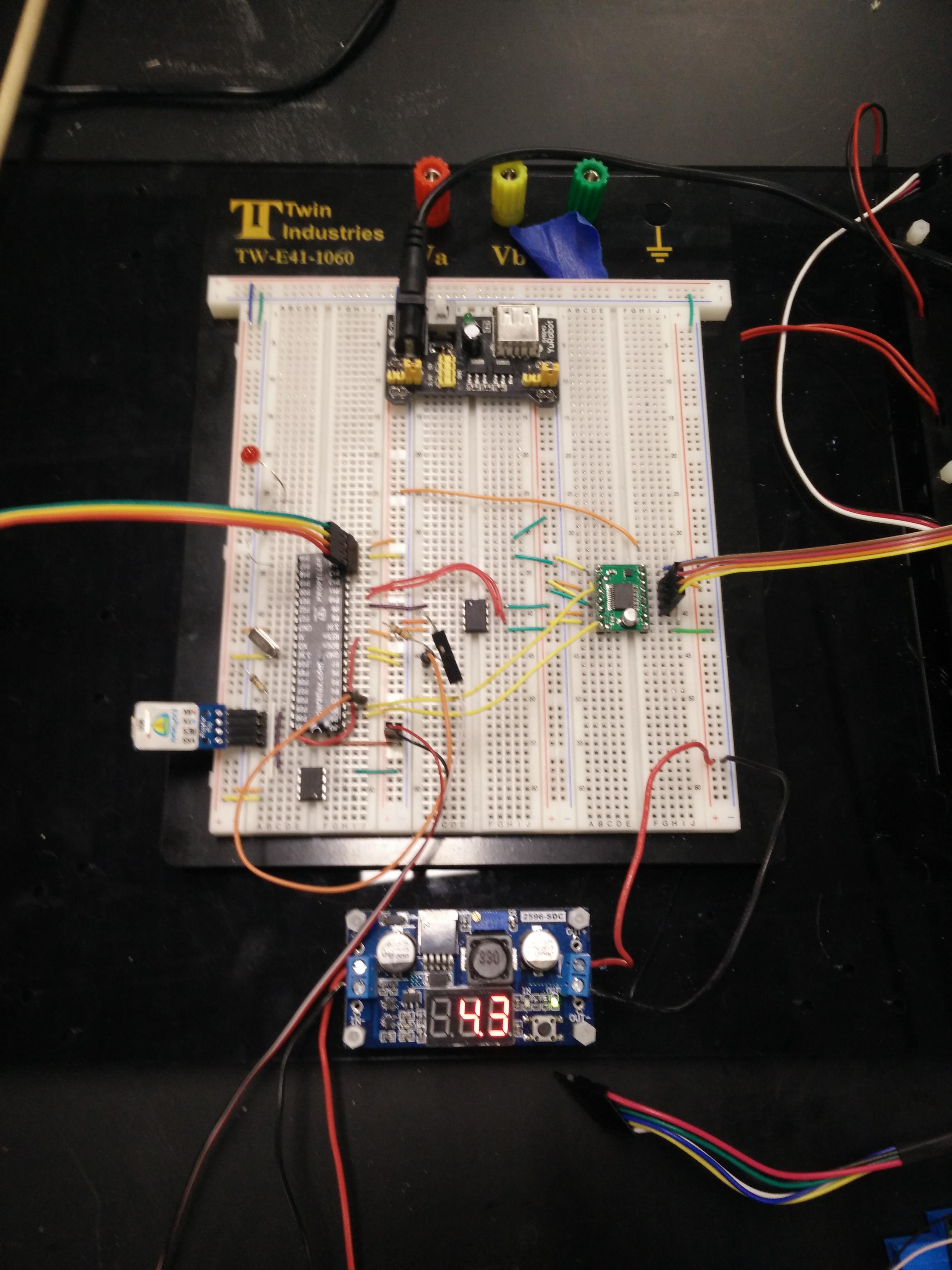
Circuitry
Complete circuit for controlling the semi-quadcopter